| Home |
Mechatronics |
About RMS |
DMC Sub |
Audio Design |
Education |
Kits & Parts |
Large motional feedback system
- Introduction, requirements and system overview
- Power supply
- Input circuit
- Active cross-over filter unit
- LF amplifier with motional feedback
- MF amplifier with special distortion cancellation
- HF MOSFET amplifier with soft clipping
- Protections
LF amplifier with motional feedback:
The motional feedback system is described by means of the following block-diagram.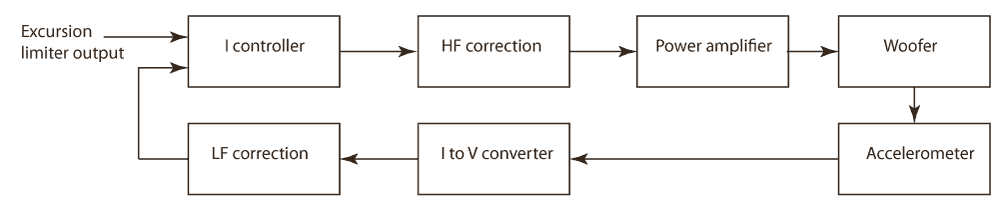
The controller with Low-pass proportional-integrating action compares the input signal from the excursion limiter with the measured acceleration of the woofer diaphragm. The acceleration is measured by a piezoelectric bending accelerometer, obtained from scrap loudspekers that I got from Philips Dendermonde and build after repair/modification under the dome of the Isophon woofer. (Unfortunately I don't have pictures of this because there were no digicams at that time)
The output of the controller passes a correction filter for phase correction of the feedbackloop and is fed into the power amplifier, followed by the woofer.
Power amplifier
The power amplifier is shown below. It has a total gain of 30× (30dB), a maximum power level of 200W @ 8 Ohm (+/-60V pk) and is based on the same principle of "addition of the missing part" that is more extensively described in the part on the MF amplifier and described in more detail in the Ir (Msc) thesis in 1977 of Hay Kockelmans, presently known from Hai-End Audio in Venlo, that I obtained at Philips where his Msc work was done. The thesis (in Dutch) is available at the archives of the Technical University Eindhoven via this link.
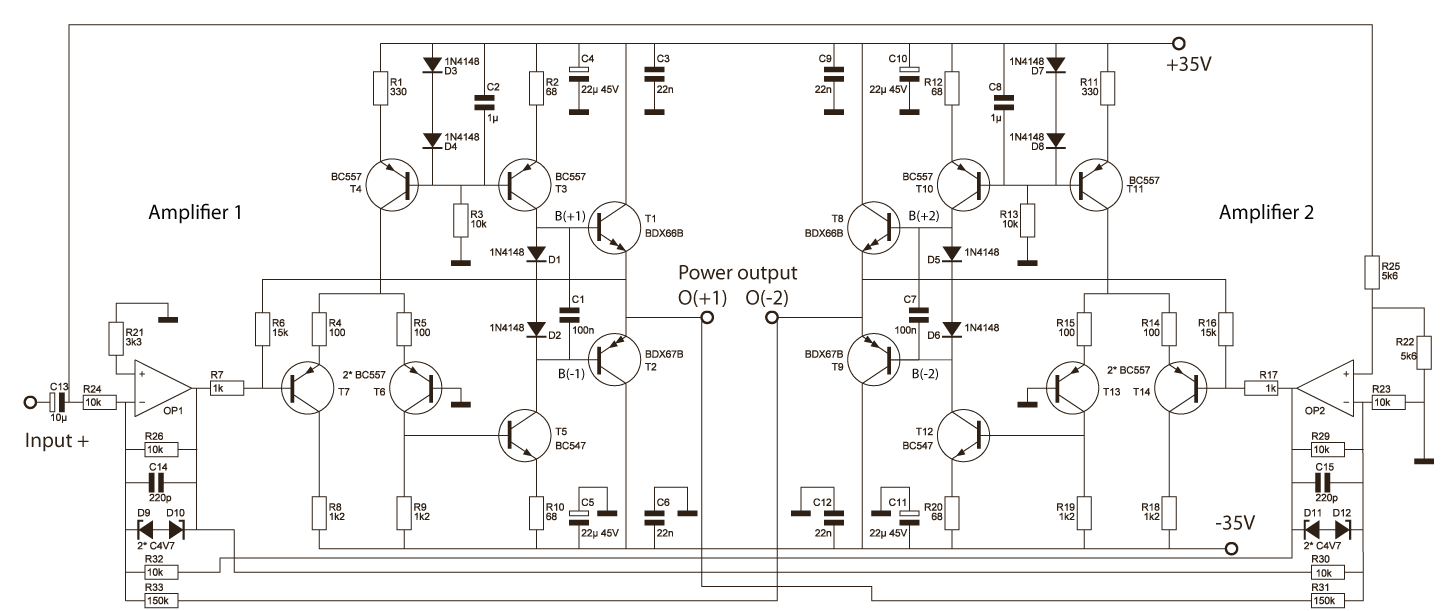
The idle current is only a few mA determined by the two diodes and the first transistor of the darlington pairs. This is sufficient for the low frequency amplification below 250 Hz. Likewise with the MF amplifier the severe effects on clipping are reduced by means of zener diodes over OP1 and OP2. Also a capacitor of 220pf is added for stability.
Acceleration sensor
More important and interesting is the MFB feedback control with the acceleration sensor, I-controller and the compensation filters.
With the help of the following circuit diagram the working principle is further explained.
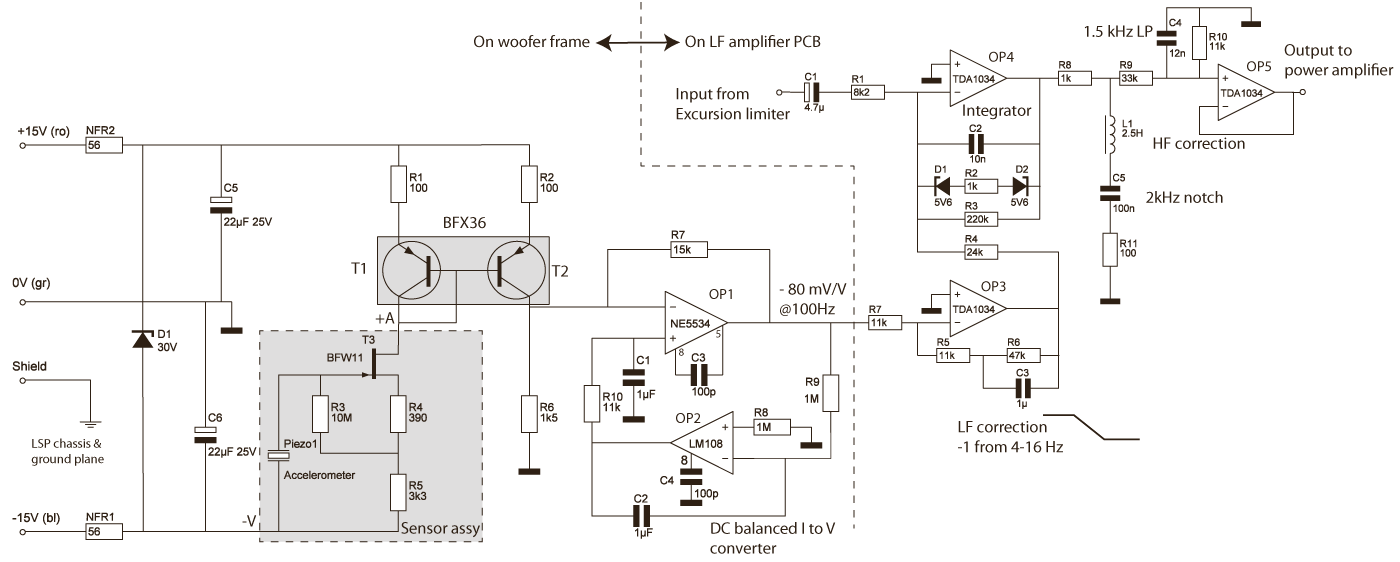
The accelerometer is a modified version of the original acceleration sensor that was used in the Philips MFB loudspeakers. The modification was proposed by Ir A.J.M. Kaizer and C.A.M. Wesche from Philips research in order to extend the response to lower frequencies without phase problems in the feedback loop.
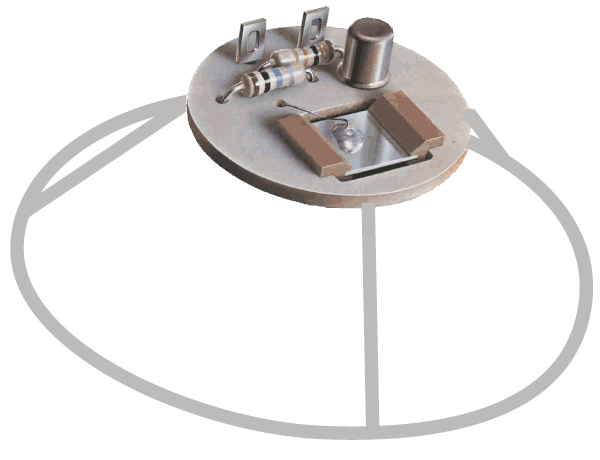
The sensor assembly is located near the voice coil just below the covering dome and consists of a piezoelectric bending element with a tuned mass of soldering material and a J-FET circuit that converts the small voltage of the sensor into a current. The mechanical setup is shown below. The disk is glued onto an aluminium tripod that connects it to the voice coil.
This second stage is a current mirror that virtually grounds the current from the sensor assy, thereby reducing feedback effects by AC voltages. Both transistors carry the same current (current mirroring) because of the joint base voltage and the equal emitter resistors to the supply voltage of +15V. The current from T2 (equal to the sensor current) now flows into another virtual ground by OP1 and is converted into a voltage by the 15k feedback resistor over OP1. OP2 acts as a DC controller with a slow (1s) Integrating (I-control) action to keep the average value of the output of OP1 equal to 0V. This slow compensation hardly influences the LF measurement performance above 10 Hz but still some phase correction appeared necessary for stability to compensate the second order roll-off from the woofer. For that reason the first order correction of OP3 is applied. It provides an increase in the measurement signal below 16 Hz, which will cause a decrease in the closed-loop response below 16 Hz which is OK of course and inside the loop it compensates for the LF fall-off by the woofer.
The original circuit with two resistors and a J-FETwas modified with an additional resistor to increase the impedance of the J-FET amplifier giving a longer RC-time with the capacitor of the piezo accelerometer. The total assembly acts is an acceleration dependent current source when supplied with a positive voltage. It only requires two wires that are connected along two of the legs of the tripod and guided through the diaphragm into a flexible bow to the woofer chassis where the second part of the sensor ciruit is directly mounted.
Shielding
The side of the sensor pointing towards the coil is provided with a grounded electrostatic shield plate. The electrostatic interference from the front side is shielded off by a conductive grid in front of the driver. Without this grid a hum is heard when approaching the driver. More importantly the electrostatic charge on a human standing on insulating shoes creates a strong field that affects the charge on the piezoelectric accelerometer. As a result the diaphragm of the woofer will move slowly with a large excursion towards you when approaching the diaphragm with your hand. Although it is nice to see this effect it is better to avoid it and keep the diaphragm in the middle position. These effects further underline the fact that the system works at very low frequencies, giving its own problems. Certainly a better solution would ave been to cover the dome over the accelerometer with a layer of grounded aluminium foil but that would require disassembling of the dome again with the risk of destruction.
Limited Integrating (PI-control) controller
The controller has a simple low pass filter characteristic with a proportional gain from 0Hz until 75 Hz and a -1 integrator-slope at higher frequencies. The total loop gain is quite limited, determined by the sensor part with 80 mV per volt input at the woofer terminals, followed by the controller with a factor 220/24=9, an attenuation of three at the HF correction filter and a gain of 30 by the power amplifiers. This is together a total feedback loop-gain of 7 (16dB). With the Low-pass integrating action of the controller at 75 Hz this gives a unity-gain cross-over frequency of 7×75= 500Hz. At that time this was already problematic as the breakup modes of the woofer caused severe instability at higher frequencies that could only be solved by a combination of a notch filter at 1 kHz and an additional low-pass filter at 1.5 kHz.
At the low frequency side the 16 dB gain gave a well controlled behaviour of the fundamental resonance at 45 Hz of the driver in the enclosure as discussed next and brought the original 42Hz resonance frequency down to below 20 Hz which was what was aimed for.
Woofer in the enclosure
The moving mass of the woofer of 60 gr. is increased by the sensor of 15 gr to 75 gr. The effective cross section of the diaphragm is 250 mm and with an enclosure volume of 70 litres this results even without motional feedback in a well damped natural frequency of 42 Hz. This is shown in the following modelled response made with an Excel toolbox that is freely available from Scanspeak.
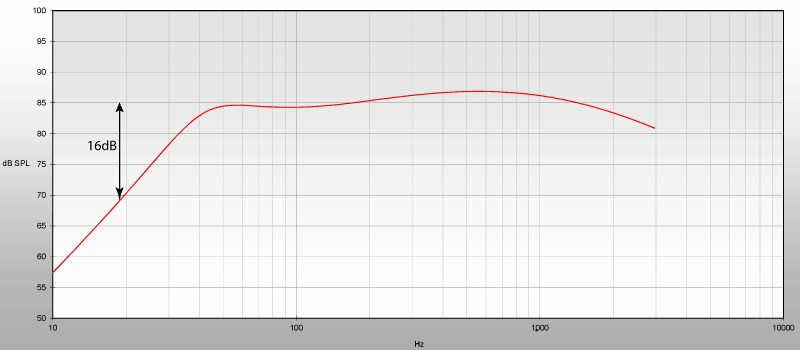
It is clear that the 16 dB loop-gain brings the low frequency response to the required sub 20 Hz level.
© 2021 Rob Munnig Schmidt